
MPC: Model Predictive Control
制御マイコンで実現するモデル予測ソリューション
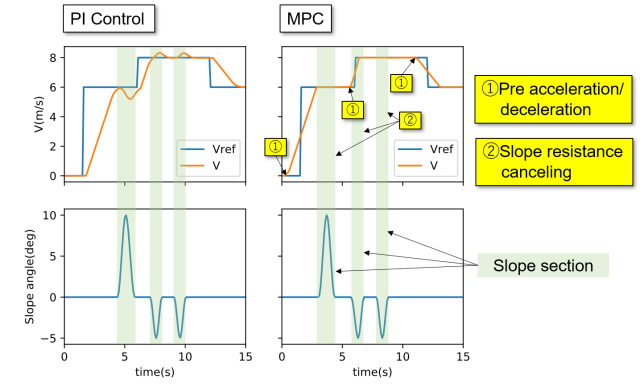
MPCは、制御対象(プラント)の出力を予測し、予測された出力が制御目的をどの程度満たすかを評価関数Hで記述し、Hが最適となる操作量をリアルタイムで探索する制御手法になります。従来のMPCでは、評価関数Hの最適解を安定的に解くために、評価関数Hの制約がありました。NSITEXEでは、評価関数Hの最適解探索にメタヒューリスティックソルバを用いることにより、任意の評価関数を設計することが出来るため、MPCの適用範囲を大幅に広げることが可能です。本手法を自動運転の速度制御に適用した場合、速度目標値の変化を先読みした予備の加減速(図1の①)や、勾配抵抗をキャンセルするトラクション発生(図1の②)を最適に行うことにより、目標速度に対する二乗誤差の平均をPI制御に比べ17%まで低減しました。
一方で自動車をはじめとする組込みシステムにおいては、消費電力、およびコスト制約が厳しく、MCU環境での限られた演算リソースではモデル予測制御を実現する高負荷な演算を実行することが困難であります。NSITEXEが販売するDR1000Cは、RISC-Vベースの並列ベクトルプロセッサIPで、最大16のハードウェア・スレッドがベクトルプロセッサを効率的に利用できるため、非常に高いパフォーマンスを実現でき、セーフティクリティカルな要件に対応するMCUで必要とされる高負荷の演算処理をオフロードするのに最適です。 本手法はDR1000Cが備えるマルチスレッド機構、およびベクトル命令に最適化されており(図2)、シングルスレッド、スカラ命令と比較して、性能4.4倍となり、高度な制御を高速に実行することが可能です。

NSITEXE Akaria
Akaria Solution